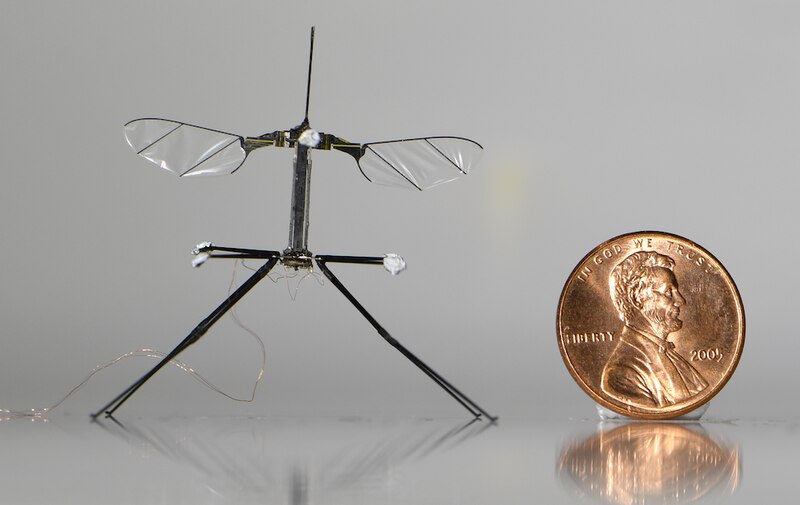
Científicos han diseñado un tren de aterrizaje y una estrategia de control inspirados en insectos que permiten a pequeños robots voladores aterrizar de forma segura en diferentes superficies. Fue bautizado como “RoboBee” (RoboAbeja).
El estudio “Sticking the landing: Insect-inspired strategies for safely landing flapping-wing aerial microrobots”, publicado en “Science Robotics” demostró que un microrrobot de alas batientes, equipado con patas flexibles bioinspiradas, podía aterrizar suavemente sobre superficies rígidas u hojas controlando su trayectoria descendente y absorbiendo el impacto.
Estos hallazgos podrían ampliar las aplicaciones de robots voladores a escala de insecto, que actualmente enfrentan dificultades para aterrizar de forma segura. Los microrrobots voladores, ligeros, tienen alas delicadas que son vulnerables a sufrir daños al impactar.
Además, los vehículos voladores generan turbulencias a través del aleteo de sus alas al acercarse a las superficies de aterrizaje (un fenómeno conocido como efecto suelo), lo que puede reducir el éxito de aterrizajes verticales y precisos para robots muy pequeños.
Inspirándose en la naturaleza, Nak-seung P. Hyun y sus colegas de la Universidad de Harvard examinaron la morfología de las patas de 27 especies diferentes de típulas. Tras analizar características como la longitud y la postura de las patas, el número de articulaciones, la ubicación de las articulaciones y la flexibilidad articular, los investigadores seleccionaron parámetros que maximizarían la disipación de energía a través de las patas durante el aterrizaje.
También utilizaron un robot de alas batientes, a escala de insecto, conocido como RoboBee, para evaluar cómo los movimientos de las alas contribuían al efecto suelo. A partir de estas observaciones y del comportamiento de aterrizaje de moscas de la fruta y abejorros, los autores crearon una estrategia de control para optimizar los aterrizajes exitosos.
Posteriormente, diseñaron un tren de aterrizaje para el RoboBee con cuatro patas flexibles de doble articulación y realizaron experimentos de vuelo utilizando el marco de la estrategia de aterrizaje, demostraron que, al modular la velocidad a medida que se acercaba a su objetivo, el RoboBee podía aterrizar suavemente en superficies irregulares como hojas.
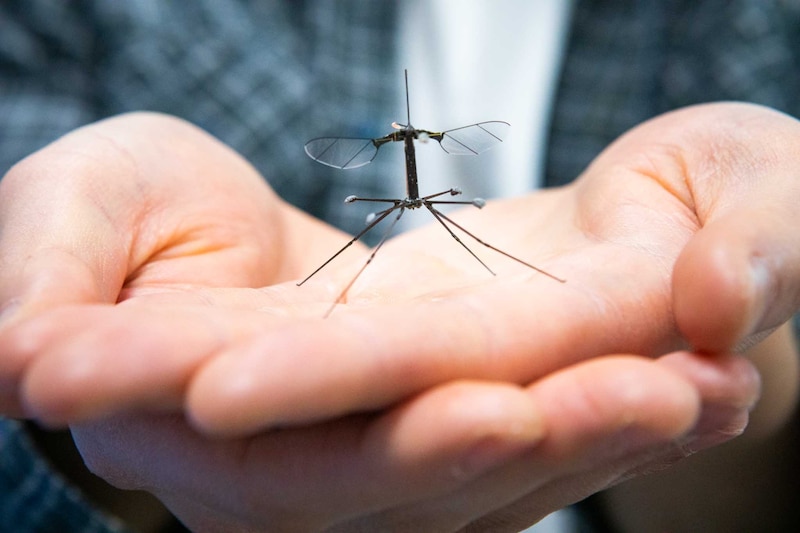
El diminuto tamaño del RoboBee y su capacidad de vuelo, similar a la de un insecto, ofrecen interesantes posibilidades para futuras aplicaciones, como la monitorización ambiental y la vigilancia de desastres. Entre las posibles aplicaciones favoritas de Chan se encuentra la polinización artificial: imaginen enjambres de RoboBees zumbando alrededor de granjas y jardines verticales del futuro.
INSPIRACIÓN EN LA TÍPULA.
El robot también podía volar de una hoja a otra, demostrando aterrizajes consistentes y precisos, sugieren que su diseño podría ayudar a implementar robots voladores a escala de insecto en futuras aplicaciones como la monitorización ambiental, la vigilancia o la manipulación de organismos delicados.
“El aterrizaje exitoso de cualquier vehículo volador depende de minimizar la velocidad al acercarse a la superficie antes del impacto y de disipar la energía rápidamente después del impacto”, explicó Hyun, actualmente profesor adjunto en la Universidad de Purdue. “Incluso con los diminutos alerones del RoboBee, el efecto suelo es considerable al volar cerca de la superficie, y la situación puede empeorar después del impacto, ya que rebota y da vueltas”.
El laboratorio se inspiró en la naturaleza para inspirar mejoras mecánicas que permitieran un vuelo hábil y un aterrizaje elegante en diversos terrenos. Eligieron la típula, un insecto relativamente lento e inofensivo que emerge de primavera a otoño y que a menudo se confunde con un mosquito gigante. “El tamaño y la escala de la envergadura y el tamaño del cuerpo de nuestra plataforma eran bastante similares a los de las típulas”, explicó Chan.
The April issue of Science #Robotics is out!
— Science Robotics (@SciRobotics) April 16, 2025
The cover features the Harvard #RoboBee equipped with #insect-inspired, flexible legs that allow the robot to land softly on a leaf. Find out more about this research and more: https://t.co/K11wJBImQn pic.twitter.com/8ni6FGiP7u
Observaron los largos apéndices articulados de las típulas, que probablemente les otorgan la capacidad de amortiguar sus aterrizajes. Las típulas se caracterizan además por sus vuelos de corta duración: gran parte de su breve vida adulta (de días a un par de semanas) transcurre aterrizando y despegando.
Considerando los registros de especímenes de la base de datos del Museo de Zoología Comparada de Harvard, el equipo creó prototipos de diferentes arquitecturas de patas, optando por diseños similares a la segmentación de las patas y la ubicación de las articulaciones de una típula. El laboratorio utilizó métodos de fabricación pioneros en el Laboratorio de Microrrobótica de Harvard para adaptar la rigidez y la amortiguación de cada articulación.
La investigadora postdoctoral y coautora Alyssa Hernandez aportó su experiencia en biología al proyecto, tras obtener su doctorado en el Departamento de Biología Organísmica y Evolutiva de Harvard, donde estudió la locomoción de los insectos. “RoboBee es una excelente plataforma para explorar la interfaz entre la biología y la robótica”, afirmó Hernandez.
“Buscar bioinspiración en la asombrosa diversidad de insectos nos ofrece innumerables vías para seguir mejorando el robot. Recíprocamente, podemos utilizar estas plataformas robóticas como herramientas para la investigación biológica, generando estudios que pongan a prueba hipótesis biomecánicas”.
AUTONOMÍA.
Actualmente, el RoboBee permanece conectado a sistemas de control externos. El equipo seguirá centrándose en ampliar el vehículo e incorporar electrónica a bordo para dotar al robot de autonomía en cuanto a sensores, alimentación y control: un triple objetivo que permitiría el verdadero despegue de la plataforma RoboBee.
“El objetivo a largo plazo es la autonomía total, pero mientras tanto hemos estado trabajando en los desafíos de los componentes eléctricos y mecánicos mediante dispositivos conectados”, declaró Robert Wood, coautor del estudio. “Como era de esperar, las correas de seguridad obstaculizaban nuestros experimentos, por lo que un aterrizaje seguro es un paso fundamental para eliminarlas”.