

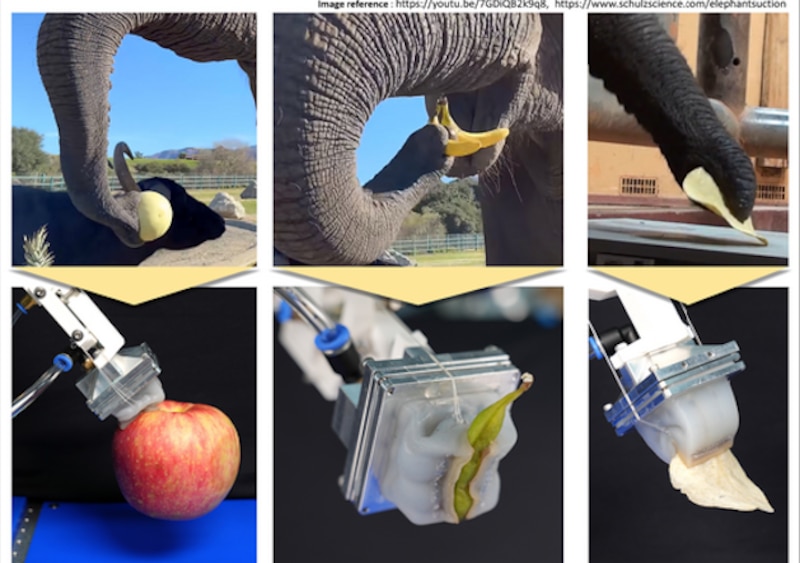
El Instituto de Maquinaria y Materiales de Corea (KIMM), una institución bajo la jurisdicción del Ministerio de Ciencia y TIC, anunció que ha desarrollado la primera pinza del mundo capaz de todos los movimientos de agarre, inspirada en trompas de elefante. Específicamente, imita cómo los elefantes recogen objetos pequeños pellizcándolos con la punta de sus trompas o agarran objetos grandes aspirando aire profundamente a través de sus trompas.
El equipo de investigación dirigido por el Dr. Sung-Hyuk Song, investigador del Departamento de Robótica y Mecatrónica de la División de Investigación de Robots AI de KIMM, desarrolló una pinza que imita la trompa de elefante y que puede sujetar objetos con un mecanismo de fusión por pellizco-succión utilizando su suave estructura, pared delgada estirable y alambres que permiten que la pinza cambie su forma. El equipo espera que esta nueva tecnología sea aplicable a varios campos, ya que no solo es capaz de transportar de manera efectiva objetos de varios tamaños, sino que también es capaz de sujetar y ensamblar objetos de manera estable, sin el uso de dispositivos mecánicos complicados o sensores
La estructura blanda de la pinza tiene varios microcanales que crean un vacío en el interior, lo que ayuda a que se adhiera a un objeto. Dado que cada uno de estos microcanales es flexible, puede modificar su forma para que coincida con la de los objetos con los que entra en contacto. Por lo tanto, la propia estructura blanda funciona como una pinza de succión al generar una fuerza adhesiva en la superficie de los objetos.
Además, al tirar de los cables que controlan la forma de la pinza, ubicada en el centro de la estructura blanda, la pinza puede doblarse por la mitad sobre sí misma, lo que permite que se use como una pinza de garra, pellizcando y sujetando los objetos. Cuando se usa de esta manera, la pared delgada estirable ubicada fuera de la pinza envuelve y sella el objeto objetivo. Al crear un vacío dentro de la pinza después de pellizcar y envolver el objeto, la fuerza de agarre se puede aumentar considerablemente según sea necesario.
A lo largo de los años, las pinzas se han desarrollado por separado como tipo garra o tipo succión. Las pinzas de tipo garra no pueden agarrar objetos que sean más grandes que el tamaño máximo al que se puede abrir la garra. Mientras tanto, las pinzas de succión son capaces de sujetar objetos de varios tamaños, pero tienen dificultades cuando sujetan objetos muy delgados como agujas o hilo, u objetos como tela o esponja a través de los cuales puede pasar el aire.
La pinza recientemente desarrollada por KIMM puede agarrar objetos de varios tamaños y materiales aplicando simultáneamente los mecanismos de agarre tipo garra y tipo succión. No solo es capaz de agarrar objetos de pequeño tamaño, como agujas de acupuntura (0,25 mm de diámetro) del suelo, que son más pequeñas que una centésima parte del tamaño de la pinza, sino que también puede agarrar objetos de gran tamaño como cajas. que son 10 veces su tamaño.
Además, esta pinza puede pellizcar y agarrar varios objetos en el modo de agarre de garra simplemente encendiendo y apagando el cilindro neumático que mueve los cables que modifican la forma, sin sensores ni controles complicados. El Dr. Sung-Hyuk Song explicó: “Después de hacer contacto con la pinza suave en el piso y luego crear un vacío mientras realiza un movimiento de pellizco, la pinza puede agarrar objetos como si estuviera pellizcando fuertemente el piso con los dedos. De esta manera, incluso los objetos muy delgados pueden agarrarse fácilmente y levantarse del suelo”.
Con las ventajas de la nueva tecnología de KIMM, la pinza puede incluso realizar tareas complejas, como prepararse para una fiesta envolviendo una muñeca en una caja de regalo, insertar un adorno de papel para pastel en el pastel y sostener cerillas en el piso de manera estable para encender velas. La pinza puede incluso arreglar flores agarrando los tallos de varias flores con formas atípicas que se encuentran en el suelo.
“Nuestra pinza de fusión de succión por pellizco, mimética de trompa de elefante recientemente desarrollada, que utiliza mecanismos de garra y succión, es suave, por lo que no hay riesgo de lesiones incluso cuando operarlo alrededor de la gente”, explicó Chanhun Park, director de la División de Investigación de Robots de IA. “No solo puede manejar objetos de varios tamaños, desde piezas finas hasta cajas, sin sensores ni estructuras mecánicas complejas, sino que también puede manejarse con facilidad, lo que significa que puede aplicarse a diversas industrias, así como a la vida diaria. Espero que sea de gran ayuda para el desarrollo de robots de servicio en la vida diaria y en las empresas que producen una variedad de objetos diferentes”.
Copyright © 2022 La Crónica de Hoy .